diff --git a/ros2/respeaker_topics.md b/ros2/respeaker_topics.md
index 4d76c5a..3484561 100644
--- a/ros2/respeaker_topics.md
+++ b/ros2/respeaker_topics.md
@@ -37,10 +37,10 @@ data: -114
data: -65
---
```
-The Direction of Arrival (DOA) for the ReSpeaker goes from -180 to 180, to see know more about how is it in Stretch watch this DOA diagram:
+The Direction of Arrival (DOA) for the ReSpeaker goes from -180 to 180, to know more about how is it in Stretch watch this DOA diagram:
-  +
+ 
The next topic is the `sound_localization`, this is similar to the `sound_direction` topic but now the result it's as pose (Quaternion Values), try it out, execute the command:
@@ -146,7 +146,7 @@ ros2 run rqt_publisher rqt_publisher
With this the rqt_publisher window will open, there you need to add the topic manually, search for the `/status_led` topic, then click in the plus button, this is the add new publisher button and the topic will be added, then you can start moving the RGBA values between 0 to 1 and that's it, you can try it with the next example:
-
+ 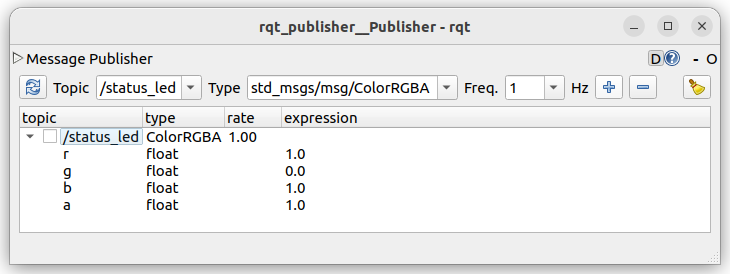
You will see that there's a purple light coming out from the ReSpeaker, you can change the rate and color if you want.
@@ -165,5 +165,4 @@ And for the final way it's going to be with a python code, here you can modify t
cd ament_ws/src/stretch_tutorials/stretch_ros_tutorials/
python3 led_color_change.py
```
-With this we can change the colors as well but the difference is that we are able to create our own patterns, in the [RealSpeaker Documentation](https://wiki.seeedstudio.com/ReSpeaker_Mic_Array_v2.0/#control-the-leds) there are more options to customize and control de LEDs.
-```
\ No newline at end of file
+With this we can change the colors as well but the difference is that we are able to create our own patterns, in the [ReSpeaker Documentation](https://wiki.seeedstudio.com/ReSpeaker_Mic_Array_v2.0/#control-the-leds) there are more options to customize and control de LEDs.