diff --git a/ros2/example_10.md b/ros2/example_10.md
index 92659ee..576b37b 100644
--- a/ros2/example_10.md
+++ b/ros2/example_10.md
@@ -27,7 +27,7 @@ ros2 run stretch_ros_tutorials tf_broadcaster
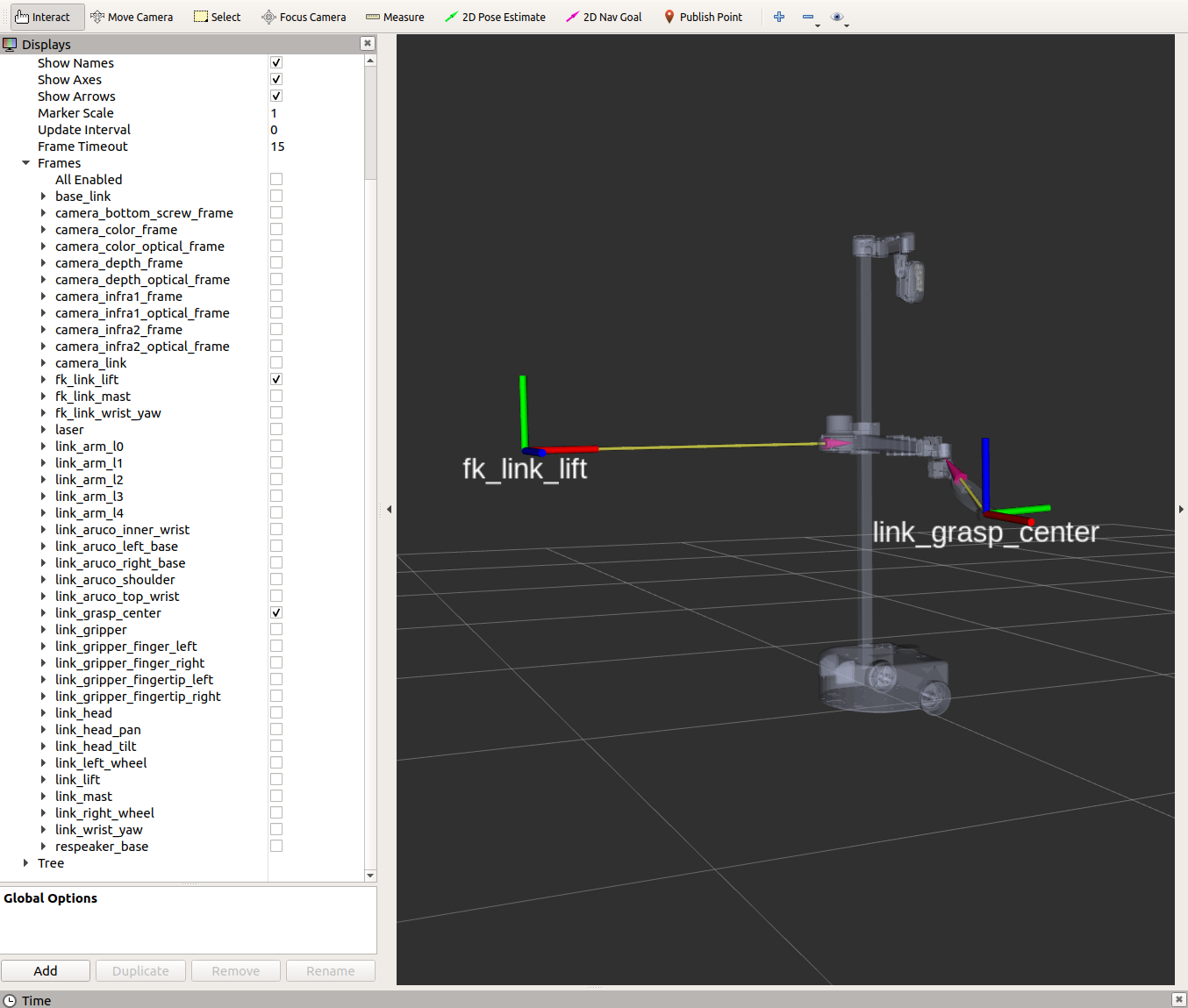
The GIF below visualizes what happens when running the previous node.
-
+
**OPTIONAL**: If you would like to see how the static frames update while the robot is in motion, run the stow command node and observe the tf frames in RViz.
@@ -35,9 +35,8 @@ The GIF below visualizes what happens when running the previous node.
```{.bash .shell-prompt}
ros2 run stretch_ros_tutorials stow_command
```
-
 +
+ 
 +
+ 
 +
+