## Example 6
In this example, we will review a Python script that prints out and stores the effort values from a specified joint. If you are looking for a continuous print of the joint state efforts while Stretch is in action, then you can use the [rostopic command-line tool](http://wiki.ros.org/rostopic) shown in the [Internal State of Stretch Tutorial](internal_state_of_stretch.md).

Begin by running the following command in the terminal in a terminal.
```bash
# Terminal 1
roslaunch stretch_core stretch_driver.launch
```
Switch the mode to *position* mode using a rosservice call. Then run the [effort_sensing.py](https://github.com/hello-robot/stretch_tutorials/blob/main/src/effort_sensing.py) node.
```bash
# Terminal 2
rosservice call /switch_to_position_mode
cd catkin_ws/src/stretch_tutorials/src/
python effort_sensing.py
```
This will send a `FollowJointTrajectory` command to move Stretch's arm or head while also printing the effort of the lift.
### The Code
```python
#!/usr/bin/env python
import rospy
import time
import actionlib
import os
import csv
from datetime import datetime
from control_msgs.msg import FollowJointTrajectoryGoal
from trajectory_msgs.msg import JointTrajectoryPoint
from sensor_msgs.msg import JointState
import hello_helpers.hello_misc as hm
class JointActuatorEffortSensor(hm.HelloNode):
"""
A class that sends multiple joint trajectory goals to a single joint.
"""
def __init__(self, export_data=False):
"""
Function that initializes the subscriber,and other features.
:param self: The self reference.
:param export_data: A boolean message type.
"""
hm.HelloNode.__init__(self)
self.sub = rospy.Subscriber('joint_states', JointState, self.callback)
self.joints = ['joint_lift']
self.joint_effort = []
self.save_path = '/home/hello-robot/catkin_ws/src/stretch_tutorials/stored_data'
self.export_data = export_data
def callback(self, msg):
"""
Callback function to update and store JointState messages.
:param self: The self reference.
:param msg: The JointState message.
"""
self.joint_states = msg
def issue_command(self):
"""
Function that makes an action call and sends joint trajectory goals
to a single joint.
:param self: The self reference.
"""
trajectory_goal = FollowJointTrajectoryGoal()
trajectory_goal.trajectory.joint_names = self.joints
point0 = JointTrajectoryPoint()
point0.positions = [0.9]
trajectory_goal.trajectory.points = [point0]
trajectory_goal.trajectory.header.stamp = rospy.Time(0.0)
trajectory_goal.trajectory.header.frame_id = 'base_link'
self.trajectory_client.send_goal(trajectory_goal, feedback_cb=self.feedback_callback, done_cb=self.done_callback)
rospy.loginfo('Sent position goal = {0}'.format(trajectory_goal))
self.trajectory_client.wait_for_result()
def feedback_callback(self,feedback):
"""
The feedback_callback function deals with the incoming feedback messages
from the trajectory_client. Although, in this function, we do not use the
feedback information.
:param self: The self reference.
:param feedback: FollowJointTrajectoryActionFeedback message.
"""
if 'wrist_extension' in self.joints:
self.joints.remove('wrist_extension')
self.joints.append('joint_arm_l0')
current_effort = []
for joint in self.joints:
index = self.joint_states.name.index(joint)
current_effort.append(self.joint_states.effort[index])
if not self.export_data:
print("name: " + str(self.joints))
print("effort: " + str(current_effort))
else:
self.joint_effort.append(current_effort)
def done_callback(self, status, result):
"""
The done_callback function will be called when the joint action is complete.
Within this function we export the data to a .txt file in the /stored_data directory.
:param self: The self reference.
:param status: status attribute from FollowJointTrajectoryActionResult message.
:param result: result attribute from FollowJointTrajectoryActionResult message.
"""
if status == actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo('Succeeded')
else:
rospy.loginfo('Failed')
if self.export_data:
file_name = datetime.now().strftime("%Y-%m-%d_%I:%M:%S-%p")
completeName = os.path.join(self.save_path, file_name)
with open(completeName, "w") as f:
writer = csv.writer(f)
writer.writerow(self.joints)
writer.writerows(self.joint_effort)
def main(self):
"""
Function that initiates the issue_command function.
:param self: The self reference.
"""
hm.HelloNode.main(self, 'issue_command', 'issue_command', wait_for_first_pointcloud=False)
rospy.loginfo('issuing command...')
self.issue_command()
time.sleep(2)
if __name__ == '__main__':
try:
node = JointActuatorEffortSensor(export_data=True)
node.main()
except KeyboardInterrupt:
rospy.loginfo('interrupt received, so shutting down')
```
### The Code Explained
This code is similar to that of the [multipoint_command](https://github.com/hello-robot/stretch_tutorials/blob/main/src/multipoint_command.py) and [joint_state_printer](https://github.com/hello-robot/stretch_tutorials/blob/main/src/joint_state_printer.py) node. Therefore, this example will highlight sections that are different from those tutorials. Now let's break the code down.
```python
#!/usr/bin/env python
```
Every Python ROS [Node](http://wiki.ros.org/Nodes) will have this declaration at the top. The first line makes sure your script is executed as a Python script.
```python
import rospy
import time
import actionlib
import os
import csv
from datetime import datetime
from control_msgs.msg import FollowJointTrajectoryGoal
from trajectory_msgs.msg import JointTrajectoryPoint
from sensor_msgs.msg import JointState
import hello_helpers.hello_misc as hm
```
You need to import rospy if you are writing a ROS [Node](http://wiki.ros.org/Nodes). Import the `FollowJointTrajectoryGoal` from the `control_msgs.msg` package to control the Stretch robot. Import `JointTrajectoryPoint` from the `trajectory_msgs` package to define robot trajectories. The `hello_helpers` package consists of a module that provides various Python scripts used across [stretch_ros](https://github.com/hello-robot/stretch_ros). In this instance, we are importing the `hello_misc` script.
```Python
class JointActuatorEffortSensor(hm.HelloNode):
"""
A class that sends multiple joint trajectory goals to a single joint.
"""
def __init__(self, export_data=False):
"""
Function that initializes the subscriber,and other features.
:param self: The self reference.
:param export_data: A boolean message type.
"""
hm.HelloNode.__init__(self)
```
The `JointActuatorEffortSensor ` class inherits the `HelloNode` class from `hm` and is initialized.
```python
self.sub = rospy.Subscriber('joint_states', JointState, self.callback)
self.joints = ['joint_lift']
```
Set up a subscriber. We're going to subscribe to the topic "*joint_states*", looking for `JointState` messages. When a message comes in, ROS is going to pass it to the function "callback" automatically. Create a list of the desired joints you want to print.
```Python
self.joint_effort = []
self.save_path = '/home/hello-robot/catkin_ws/src/stretch_tutorials/stored_data'
self.export_data = export_data
```
Create an empty list to store the joint effort values. The *self.save_path* is the directory path where the .txt file of the effort values will be stored. You can change this path to a preferred directory. The *self.export_data* is a boolean and its default value is set to False. If set to True, then the joint values will be stored in a .txt file, otherwise, the values will be printed in the terminal where you ran the effort sensing node.
```python
self.trajectory_client.send_goal(trajectory_goal, feedback_cb=self.feedback_callback, done_cb=self.done_callback)
```
Include the feedback and done call back functions in the send goal function.
```python
def feedback_callback(self,feedback):
"""
The feedback_callback function deals with the incoming feedback messages
from the trajectory_client. Although, in this function, we do not use the
feedback information.
:param self: The self reference.
:param feedback: FollowJointTrajectoryActionFeedback message.
"""
```
The feedback callback function takes in the `FollowJointTrajectoryActionFeedback` message as its argument.
```python
if 'wrist_extension' in self.joints:
self.joints.remove('wrist_extension')
self.joints.append('joint_arm_l0')
```
Use a conditional statement to replace `wrist_extenstion` to `joint_arm_l0`. This is because `joint_arm_l0` has the effort values that the `wrist_extension` is experiencing.
```python
current_effort = []
for joint in self.joints:
index = self.joint_states.name.index(joint)
current_effort.append(self.joint_states.effort[index])
```
Create an empty list to store the current effort values. Then use a for loop to parse the joint names and effort values.
```python
if not self.export_data:
print("name: " + str(self.joints))
print("effort: " + str(current_effort))
else:
self.joint_effort.append(current_effort)
```
Use a conditional statement to print effort values in the terminal or store values into a list that will be used for exporting the data in a .txt file.
```Python
def done_callback(self, status, result):
"""
The done_callback function will be called when the joint action is complete.
Within this function we export the data to a .txt file in the /stored_data directory.
:param self: The self reference.
:param status: status attribute from FollowJointTrajectoryActionResult message.
:param result: result attribute from FollowJointTrajectoryActionResult message.
"""
```
The done callback function takes in the `FollowJointTrajectoryActionResult` messages as its arguments.
```python
if status == actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo('Succeeded')
else:
rospy.loginfo('Failed')
```
Conditional statement to print whether the goal status in the `FollowJointTrajectoryActionResult` succeeded or failed.
```python
if self.export_data:
file_name = datetime.now().strftime("%Y-%m-%d_%I:%M:%S-%p")
completeName = os.path.join(self.save_path, file_name)
with open(completeName, "w") as f:
writer = csv.writer(f)
writer.writerow(self.joints)
writer.writerows(self.joint_effort)
```
A conditional statement is used to export the data to a .txt file. The file's name is set to the date and time the node was executed. That way, no previous files are overwritten.
### Plotting/Animating Effort Data
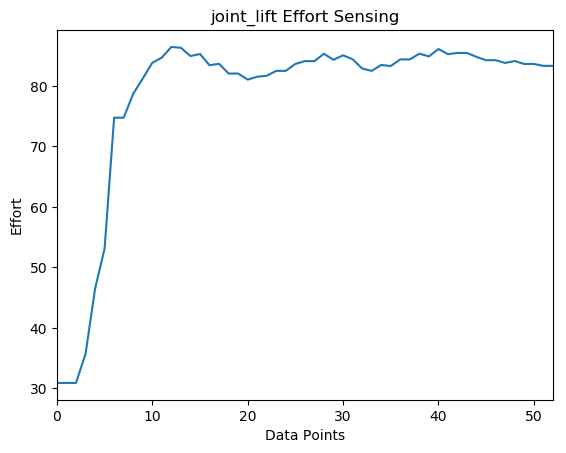
We added a simple python script, [stored_data_plotter.py](https://github.com/hello-robot/stretch_tutorials/blob/main/src/stored_data_plotter.py), to this package for plotting the stored data. **Note** you have to change the name of the file you wish to see in the python script. This is shown below:
```Python
####################### Copy the file name here! #######################
file_name = '2022-06-30_11:26:20-AM'
```
Once you have changed the file name, then run the following in a new command.
```bash
cd catkin_ws/src/stretch_tutorials/src/
python3 stored_data_plotter.py
```
Because this is not a node, you don't need `roscore` to run this script. Please review the comments in the python script for additional guidance.