
7.1 KiB

Noetic Installation Instructions
The code in this development branch and this installation guide are both under active development. Please proceed with caution.
These instructions will guide you through the process of installing the Noetic version of stretch_ros onto a Stretch RE1 robot that has a factory installation of the Melodic version of stretch_ros. If you run into a problem, you may find a solution in the trouble shooting section at the end of this document.
Install a partition with Ubuntu 20.04 Desktop Edition
- Download and write the Ubuntu 20.04 iso file to a USB key.
- Backup all of the critical files from the existing Ubuntu 18.04 partition on the robot.
- Make sure you have sufficient space on the robot’s solid state drive (SSD) for a new partition with Ubuntu 20.04.
- The Stretch RE1 typically ships with a 500 GB SSD drive. The default ROS Melodic installation typically takes up less than 20 GB when shipped. However, the robot may be using much more space due to use.
- The default ROS Noetic installation typically takes up less than 20 GB, but you will want additional space while using the robot.
- Boot the robot with the USB key plugged into a USB port in the robot’s trunk.
- The installer should detect the Ubuntu 18.04 installation and provide the option to install Ubuntu 20.04 alongside Ubuntu 18.04. This option will be selected by default.
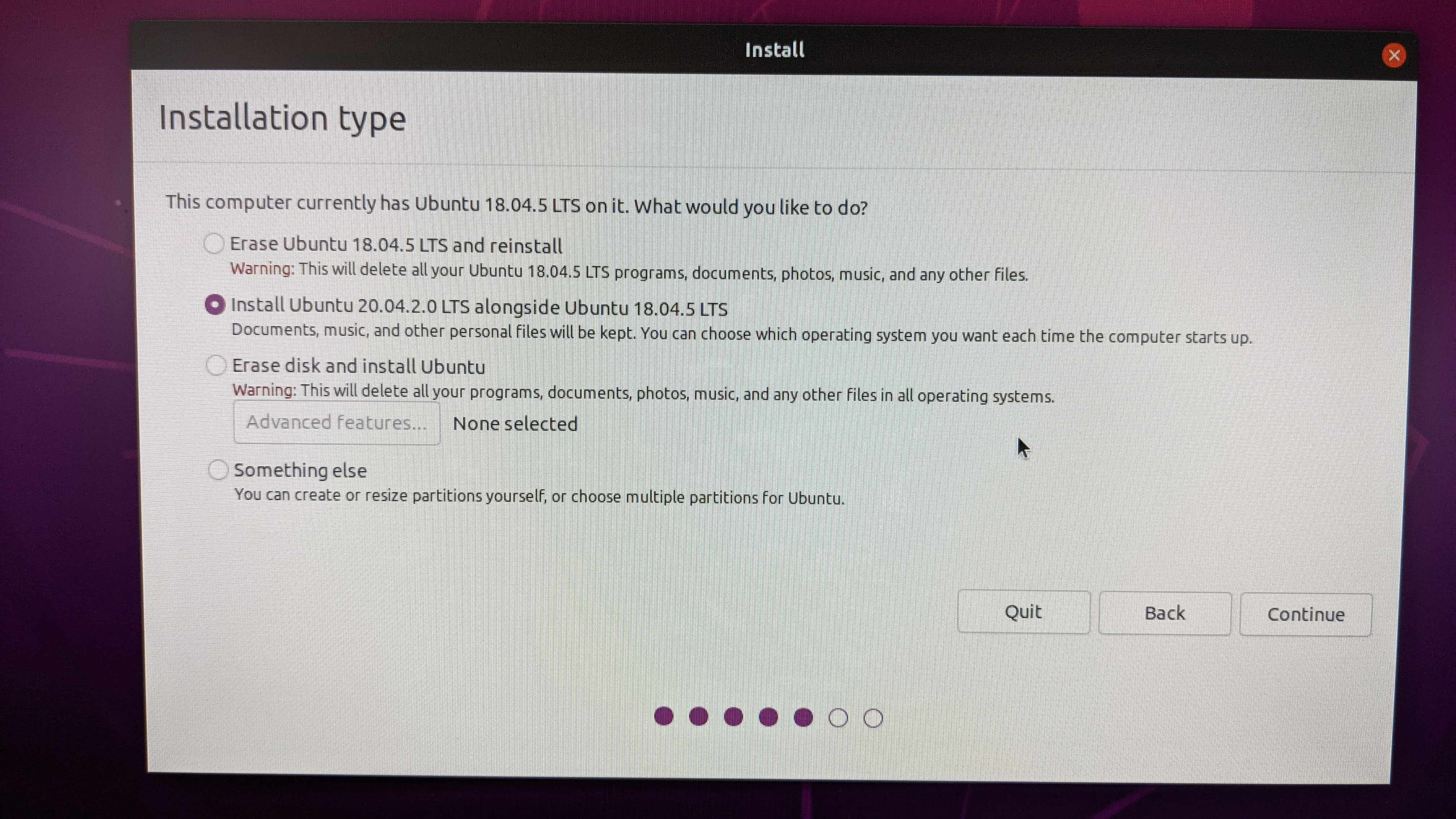
- Proceed with the option to install Ubuntu 20.04 alonside Ubuntu 18.04. This will result in a new partition with Ubuntu 20.04. You will have the opportunity to decide how much space to devote to each partition.
Copy materials from the robot's original Ubuntu 18.04 partition
- Boot into the robot's original Ubuntu 18.04 partition.
- Copy the
/etc/hello-robotto a USB key.- For example, you can run
cp -r /etc/hello-robot /media/$USER/USBKEYfrom the command line where USBKEY is the mounted USB key. - Or, you can open the file explorer to copy the directory. Make sure you look for
/etc/hello-roboton the original Ubuntu 18.04 partition rather than the new partition.
- For example, you can run
- Boot into the robot's new Ubuntu 20.04 partition.
- Copy the folder of the form "stretch-re1-xxxx" found in the
hello-robotdirectory into the home folder (i.e./home/$USER/).- For example, you can run a command similar to
cp -r /media/$USER/USBKEY/hello-robot/stretch-re1-xxxx /home/$USER/ - Or, you can use the visual file explorer.
- For example, you can run a command similar to
Run the setup script with the robot's new Ubuntu 20.04 installation
- Using a terminal, go to the home directory of the new Ubuntu 20.04 installation with
cd. Then run the following commands. sudo apt install gitcd $HOMEgit clone https://github.com/hello-robot/stretch_install.git -b dev/install_20.04cd ./stretch_install/factory && ./stretch_install_nonfactory.sh- You will need to provide input when prompted, including your robot's number and your password. The password request can come late in the process and freeze installation until you provide it.
Check that the robot's Noetic ROS installation is working
- Shutdown and power off your robot. Then turn your robot back on. Once you're logged in, you can test your robot with the following commands.
- Go ahead and attempt to home your robot using
stretch_robot_home.py. It should be calibrated afterward. - Run
stretch_robot_system_check.pyto make sure that things are normal. Ideally, you will see all green and no red. It's not unusual for a cliff sensor to be red due to reporting a value outside of its ideal range. - Make sure the game controller dongle is plugged in and run
stretch_xbox_controller_teleop.py. Use the game controller to test out the motions of the robot. - Run
roslaunch stretch_core wheel_odometry_test.launch. You should see coherent visualizations of the robot's body, the laser range finder output, and the D435i point cloud output. You should be able to move the robot around using keyboard commands and see reasonable visualizations in RViz. - You may delete the
./stretch-re1-xxxxdirectory and its contents that you copied over from the Ubuntu 18.04 partition, if you'd like.
Recalibrate your robot
- The new Noetic ROS installation starts out by using the calibrated URDF that was created at the Hello Robot factory.
- We recommend that you recalibrate your robot by following the stretch_calibration instructions. This takes about 1.5 hours of robot time, but will result in a higher-quality model that matches the current state of the robot. For example, shipping can sometimes shift components a little.
Noetic Installation Troubleshooting
This section provides suggestions for common errors that occur during installation. If you become stuck and don't find an answer here, please email us or contact us through the forum.
Firmware Mismatch Error
If you are seeing the following error:
----------------
Firmware protocol mismatch on hello-.
Protocol on board is pX.
Valid protocol is: pX.
Disabling device.
Please upgrade the firmware and/or version of Stretch Body.
----------------
Your version of Stretch Body does not align with the firmware installed with your robot. Run the firmware updater tool to automatically update the firmware to the required version for your software.
$ python -m pip install hello-robot-stretch-factory
$ RE1_firmware_updater.py
Homing Error
If using stretch_robot_home.py does not result in the robot being calibrated, try running the command again. If this does not work, try shutting down the robot, turning off the robot with the power switch, waiting for a few seconds, and then powering it on again. Then, try stretch_robot_home.py again. For unknown reasons, one of our robots has needed to be homed, rebooted, and homed again after following this installation guide.
ROS Launch File Fails
The launch files have nondeterministic behavior. Sometimes they need to be run more than once for the nodes to start in a successful order that works. For example, a common symptom of a failed launch is the visualization of the robot's body appearing white and flat in RViz.
Start Over by Reinstalling Ubuntu 20.04
You may decide to start over. If so, you can follow these steps to first delete your current Ubuntu 20.04 partition and then reinstall Ubuntu 20.04.
- Backup any materials you wish to keep in your Ubuntu 20.04 partition.
- Boot into Ubuntu 18.04, so that you can delete your Ubuntu 20.04 partition.
- While in Ubuntu 18.04, run GNOME Disks. You can find this disk management software by going to "Show Applications" and searching for "Disks".
- Use GNOME Disks to delete your Ubuntu 20.04 partition. For example, you can click on the partition to select it and then press the minus sign to start the process. Once you succeed in deleting the partition, it should be labeled as "Free Space".
- Shutdown your robot.
- Now proceed with the instructions above, starting with "Install a partition with Ubuntu 20.04 Desktop Edition"