|
|
- # Spawning Stretch in Simulation (Gazebo)
-
- !!! note
- ROS 2 tutorials are still under active development.
-
- !!! note
- Simulation support for Stretch in ROS 2 is under active development. Please reach out to us if you want to work with Stretch in a simulated environment like Gazebo/Ignition in ROS 2.
-
- Refer to the instructions below if you want to test this functionality in ROS 1.
-
- ### Empty World Simulation
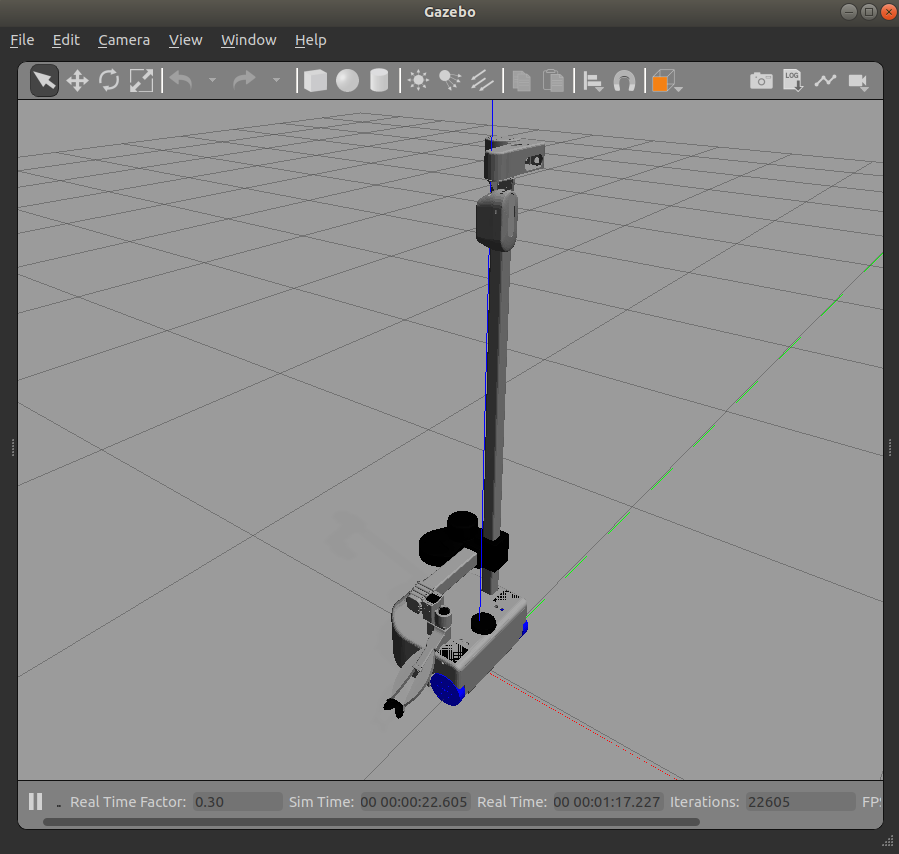
- To spawn the Stretch in gazebo's default empty world run the following command in your terminal.
-
- ```{.bash .shell-prompt}
- roslaunch stretch_gazebo gazebo.launch
- ```
-
- This will bringup the robot in the gazebo simulation similar to the image shown below.
-
- <!-- <img src="images/stretch_gazebo_empty_world.png" width="500" align="center"> -->
- 
-
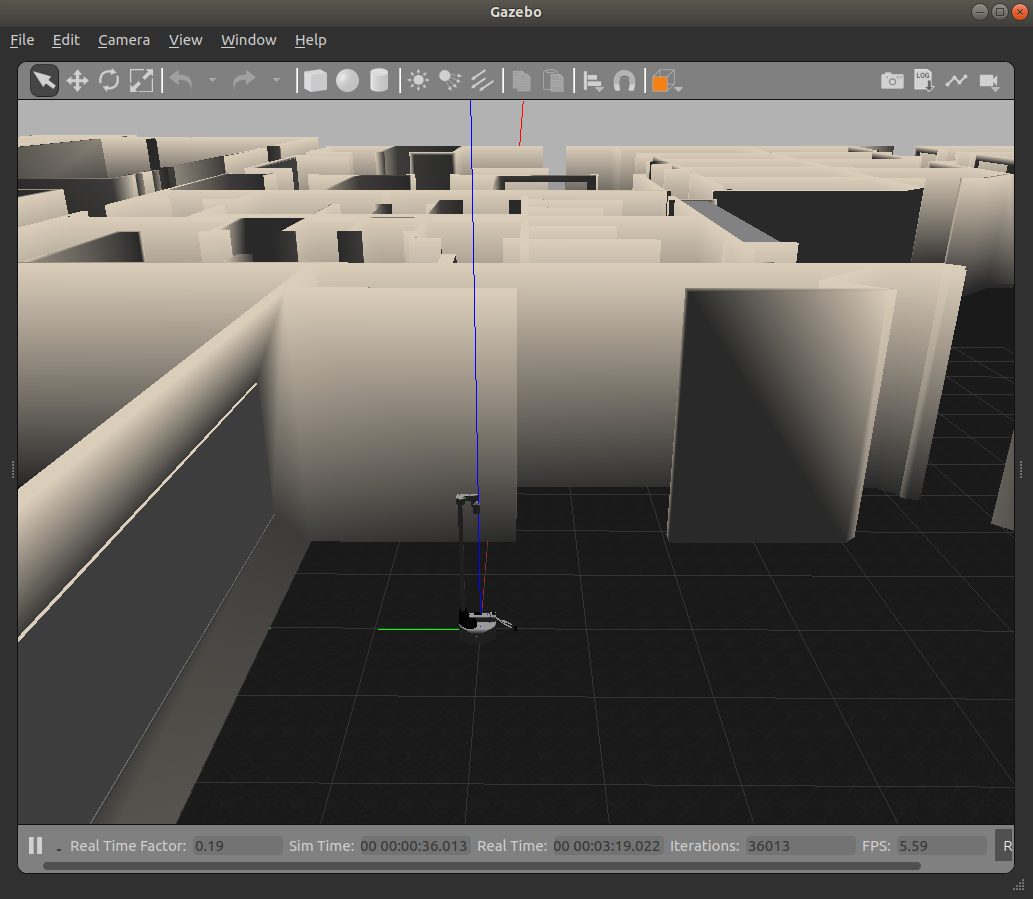
- ### Custom World Simulation
- In gazebo, you are able to spawn Stretch in various worlds. First, source the gazebo world files by running the following command in a terminal
-
- ```{.bash .shell-prompt}
- echo "source /usr/share/gazebo/setup.sh"
- ```
-
- Then using the world argument, you can spawn the stretch in the willowgarage world by running the following
-
- ```{.bash .shell-prompt}
- roslaunch stretch_gazebo gazebo.launch world:=worlds/willowgarage.world
- ```
-
- 
-
|


