|
|
- # Gripper
-
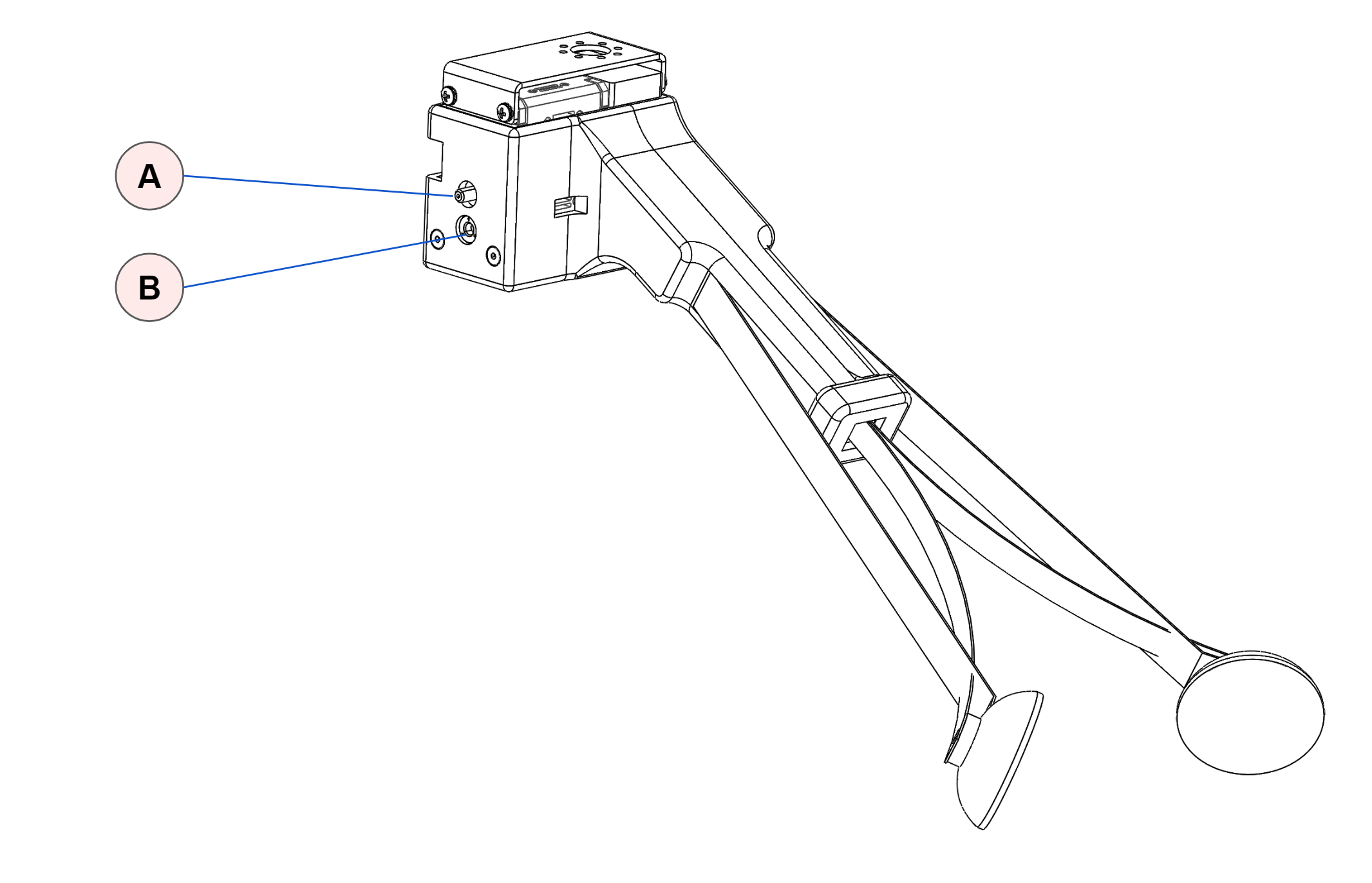
- The Stretch Compliant Gripper utilizes a Dynamixel XL430-W250-T servo to drive the spring grasper mechanism. The kinematics of the grasper mechanism is complex and non-linear relative to the motor position. As shown, it includes mounting features on one side to allow for the attachment of simple rigid tools such as [hooks and pullers](https://github.com/hello-robot/stretch_tool_share/tree/master/tool_share/puller_v1).
-
- 
-
- <table>
- <tr>
- <td></td>
- <td>Item</td>
- <td>Notes</td>
- </tr>
- <tr>
- <td>A</td>
- <td>Stud attachment</td>
- <td>Threaded 6-32</td>
- </tr>
- <tr>
- <td>B</td>
- <td>Thread attahcment</td>
- <td>Threaded M4</td>
- </tr>
- </table>
-
- The attachment features are spaced at 9 mm.
-
- The weight of the Stretch Compliant Gripper is 240 g.
-
- ## Gripper Removal
-
- Here we describe removing the Stretch Compliant gripper. Installation is simply these steps in reverse.
-
- 1. Unplug the Dynamixel cable from the back of the gripper.
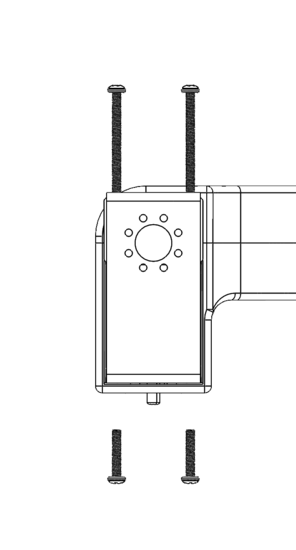
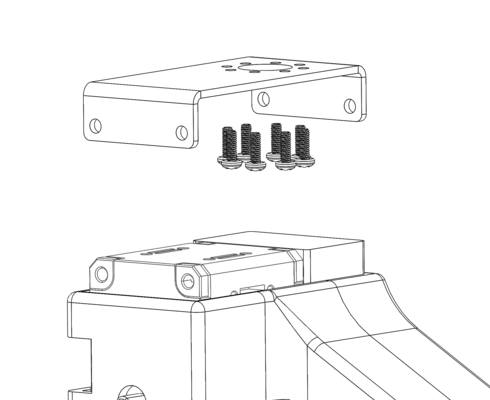
- 2. Remove the 4 screws holding the gripper to the bracket.
- 3. Remove the gripper from the mounting bracket
- 4. Unscrew the 8 screws holding the mounting bracket to the bottom of the tool plate.
-
- 
-
- 
|

