@ -48,7 +48,7 @@ Then, route the Dynamixel cable through the center of the standard gripper mount
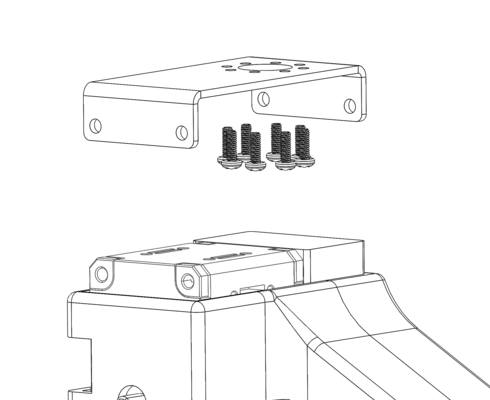
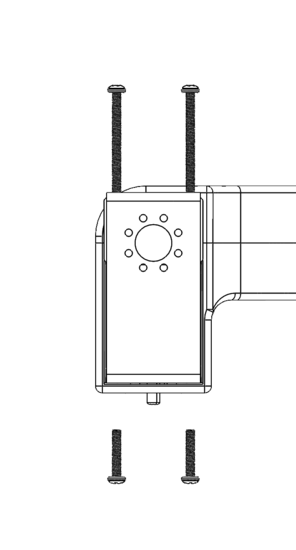
Now, affix the four screws, with the shorter two going to the servo side, to hold the gripper to the bracket. Lastly, route the dynamixel cable through the back of the gripper and plug it securely into the servo.
Now, affix the four screws, with the shorter two going to the servo side, to hold the gripper to the bracket. Lastly, route the Dynamixel cable through the back of the gripper and plug it securely into the servo.
Next, to ensure the correct gripper is recognized by ROS, we need to update the URDF. For this, first open the stretch_description.xacro file like below.
```bash
cd ~/catkin_ws/src/stretch_ros/stretch_description
cd ~/catkin_ws/src/stretch_ros/stretch_description/urdf

 hello-chintan
1 year ago
hello-chintan
1 year ago