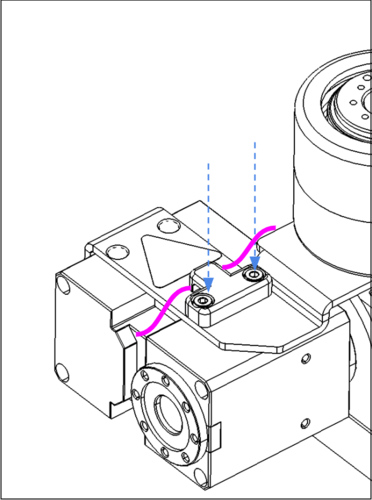
Now, remove the cable clip by unscrewing the M2.5x8mm bolts and then unplug the Dynamixel cable out of the wrist pitch servo (pink).
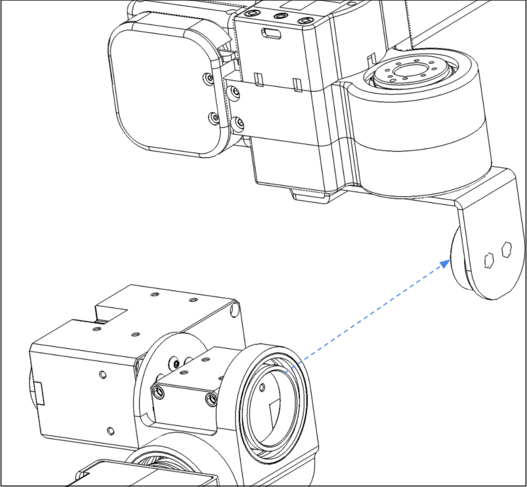
Next, rotate the wrist yaw joint so that the wrist pitch servo body is accessible. Detach the pitch servo from the mounting bracket by unscrewing the four M2.5x4mm screws (C) with the T8 Torx wrench.
Then, lower the wrist module vertically away from the mounting bracket.
Lastly, detach the wrist mount bracket (A) from the bottom of the tool plate by removing the M2x6mm bolts (B) using a T6 Torx wrench.
Here we describe attaching the Standard Wrist gripper.
First, note where the forward direction is on the wrist yaw tool plate. This is indicated by the additional alignment hole that is just outside the bolt pattern shown pointing down in the image.
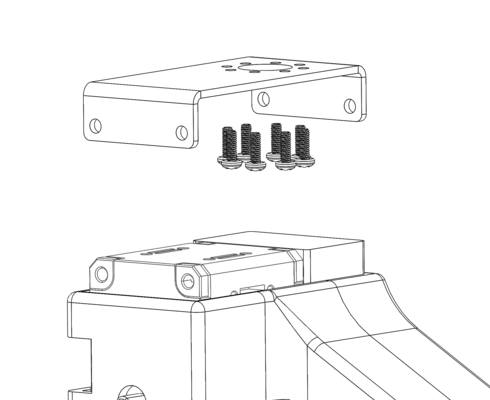
Then, route the Dynamixel cable through the center of the standard gripper mounting bracket and install the bracket with the eight screws and T6 Torx wrench. Make sure the forward marking on the bracket matches the forward marking on the wrist yaw.
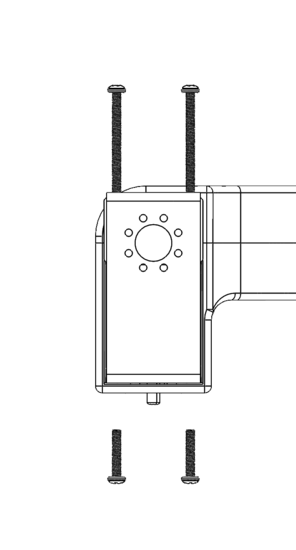
Now, affix the four screws, with the shorter two going to the servo side, to hold the gripper to the bracket. Lastly, route the dynamixel cable through the back of the gripper and plug it securely into the servo.

 hello-chintan
1 year ago
hello-chintan
1 year ago