|
|
@ -26,8 +26,18 @@ Switch to 'navigation' [mode](https://github.com/hello-robot/stretch_ros/tree/no |
|
|
rosservice call /switch_to_navigation_mode |
|
|
rosservice call /switch_to_navigation_mode |
|
|
``` |
|
|
``` |
|
|
|
|
|
|
|
|
Run base teleop: |
|
|
|
|
|
|
|
|
Run base keyboard teleop: |
|
|
|
|
|
|
|
|
``` |
|
|
``` |
|
|
TODO |
|
|
|
|
|
|
|
|
roslaunch stretch_core teleop_twist.launch |
|
|
``` |
|
|
``` |
|
|
|
|
|
|
|
|
|
|
|
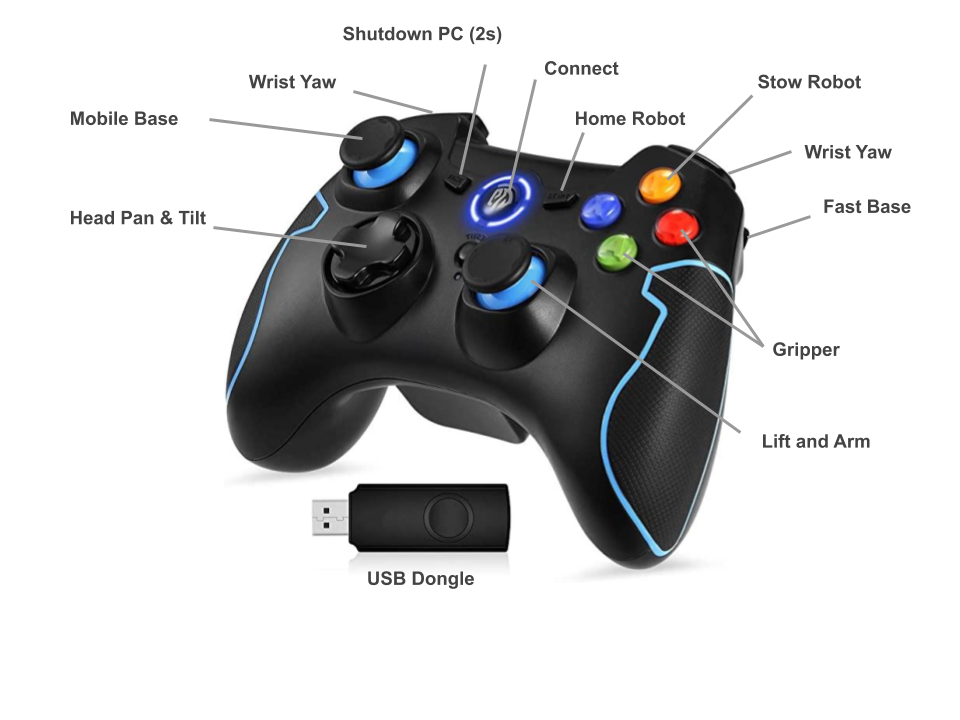
or if you have the Xbox controller: |
|
|
|
|
|
|
|
|
|
|
|
``` |
|
|
|
|
|
roslaunch stretch_core teleop_twist.launch teleop_type:=joystick |
|
|
|
|
|
``` |
|
|
|
|
|
|
|
|
|
|
|
The deadman button is the 'A' button (the green one). |
|
|
|
|
|
|
|
|
|
|
|
 |

 Binit Shah
1 year ago
Binit Shah
1 year ago
 GitHub
GitHub