
1.9 KiB
Visualizing with RViz
You can utilize RViz to visualize Stretch's sensor information. To begin, in a terminal, run the stretch driver launch file.
roslaunch stretch_core stretch_driver.launch
Then, run the following command in a separate terminal to bring up a simple RViz configuration of the Stretch robot.
rosrun rviz rviz -d `rospack find stretch_core`/rviz/stretch_simple_test.rviz
An RViz window should open, allowing you to see the various DisplayTypes in the display tree on the left side of the window.
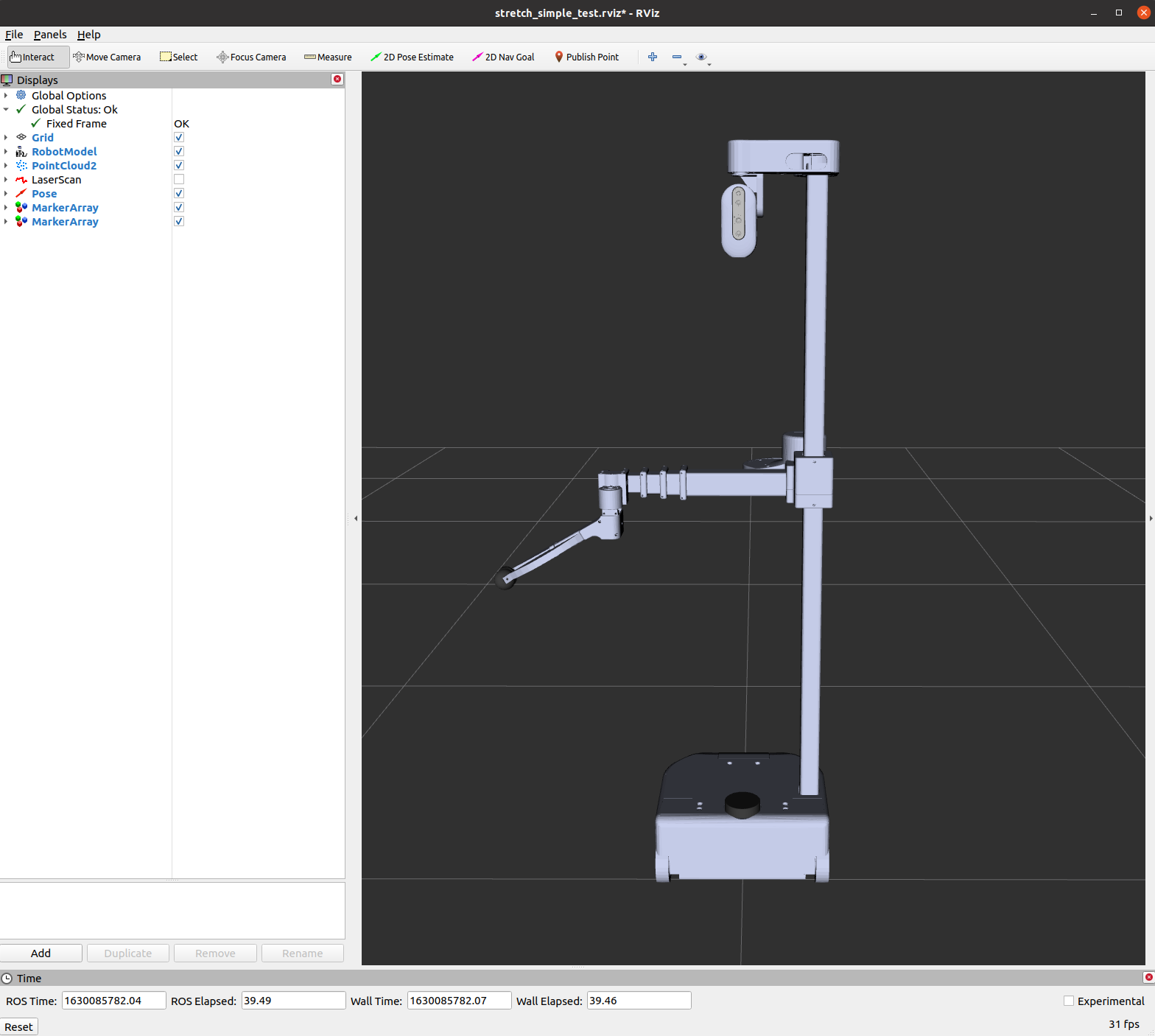
If you want to visualize Stretch's tf transform tree, you need to add the display type to the RViz window. First, click the Add button and include the TF type in the display. You will then see all of the transform frames of the Stretch robot, and the visualization can be toggled off and on by clicking the checkbox next to the tree. Below is a gif for reference.
There are further tutorials for RViz which can be found here.
Running RViz and Gazebo (Simulation)
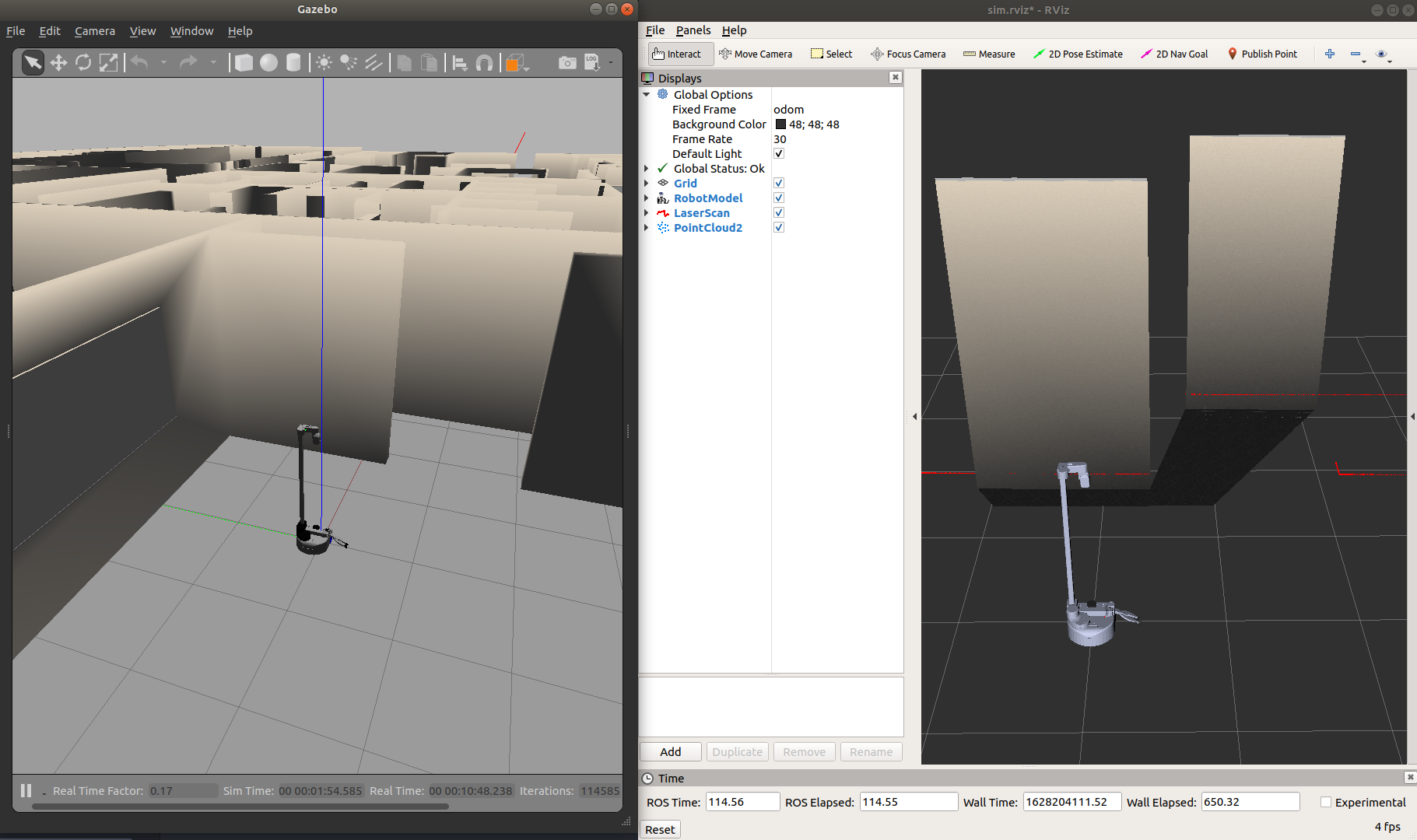
Let's bring up Stretch in the willow garage world from the gazebo basics tutorial and RViz by using the following command.
roslaunch stretch_gazebo gazebo.launch world:=worlds/willowgarage.world rviz:=true
The rviz flag will open an RViz window to visualize a variety of ROS topics.
Bring up the keyboard teleop node to drive Stretch and observe its sensor input.