
8.4 KiB
Commanding Stretch to Move
This tutorial covers sending various kinds of motion commands to Stretch.
Introducing Stretch Body
"Stretch Body" is a Python library for Stretch. It's already installed on your robot. The library gives you an interface to command Stretch's body to move. We start by creating an instance of the stretch_body.robot.Robot class.
import stretch_body.robot
r = stretch_body.robot.Robot()
The hardware can only talk to one instance at a time, so if you see an Another process is already using Stretch. Try running "stretch_free_robot_process.py" error, you'll need to close the other application or use the stretch_free_robot_process.py CLI to free up the hardware.
Next, we'll call the startup() method, which opens USB communication with the hardware, loads the parameters that dictate robot behavior, and launches a few helper threads to poll for status in the background.
did_startup = r.startup()
print(f'Robot connected to hardware: {did_startup}')
To close down the connection to the hardware, use stop(). Next, we'll check if the robot is "homed", i.e. the robot knows the zero position for each joint.
is_homed = r.is_homed()
print(f'Robot is homed: {is_homed}')
To execute the homing procedure, use home(). Ensure the robot has space around it.
Sending Position Commands
Stretch has the following joints:
- Left and right wheels, constituting a differential drive
- Pristmatic vertical lift
- Prismatic telescoping horizontal arm
- Up to three revolute joints in the wrist: yaw, pitch, and roll
- Print out
r.end_of_arm.jointsto see which joints your Stretch has
- Print out
- Gripper
- Two revolute joints in the head: pan & tilt
Each of these joints are accessible as an attribute of the Robot object.
# The mobile base:
print(r.base)
# The arm/lift:
print(r.arm, r.lift)
# The wrist/gripper
print(r.end_of_arm)
# The head
print(r.head)
Use the move_to(pos) method under each joint to queue up a command.
r.arm.move_to(0.2) # 0.2 meters
r.lift.move_to(0.6) # 0.6 meters
The arm and lift won't move yet. The commands have been queued up, but the hardware will wait to begin moving until we call push_command().
r.push_command()
The mobile base doesn't have a move method. Instead, its methods are translate_by(delta) and rotate_by(delta).
r.base.translate_by(0.2) # 0.2 meters
r.push_command()
r.base.rotate_by(0.1) # 0.1 radians
r.push_command()
You'll notice the base doesn't translate forward by 0.2m. Instead, it skips to rotating counter-clockwise by 0.1rad. This happens because push_command() is asynchronous (i.e. the method returns immediately, and the program flow continues immediately to execute the rotation command). Use the wait_command() method to wait for the command to complete execution.
r.base.translate_by(0.2) # 0.2 meters
r.push_command()
r.wait_command()
r.base.rotate_by(0.1) # 0.1 radians
r.push_command()
r.wait_command()
The wrist and head joints are Dynamixel servos. Their API is move_to(name, pos), and their commands aren't queued. They execute immediately.
print(f'Wrist joints: {r.end_of_arm.joints}') # ['wrist_yaw', 'wrist_pitch', 'wrist_roll', 'stretch_gripper']
r.end_of_arm.move_to('wrist_yaw', 1.57)
wait_command() will still work here. The gripper uses the same move_to(name, pos) API, and accepts values between -100 to 100, where the gripper is fully closed at -100 and fully open at 100.
r.end_of_arm.move_to('stretch_gripper', 100)
Querying Stretch's current joint state
The current state of each joint is available in a Python dictionary called status under each joint.
# Wheel odometry
print(r.base.status['x'], r.base.status['y'], r.base.status['theta']) # (x meters, y meters, theta radians)
# Arm/lift positions
print(r.arm.status['pos'], r.lift.status['pos']) # (arm meters, lift meters)
The wrist and head joints are Dynamixel servos. Their status dictionary is under the get_joint(name) method.
# Wrist positions
print(f'Wrist joints: {r.end_of_arm.joints}')
print(r.end_of_arm.get_joint('wrist_yaw').status['pos']) # radians
# Head positions
print(f'Head joints: {r.head.joints}')
print(r.head.get_joint('head_pan').status['pos']) # radians
Querying Stretch's joint limits
Whereas the mobile base is unbounded (i.e. translate_by(delta) can take any value for delta), the rest of the joints have joint limits. They are available as part of the soft_motion_limits dictionary.
Arm & Lift
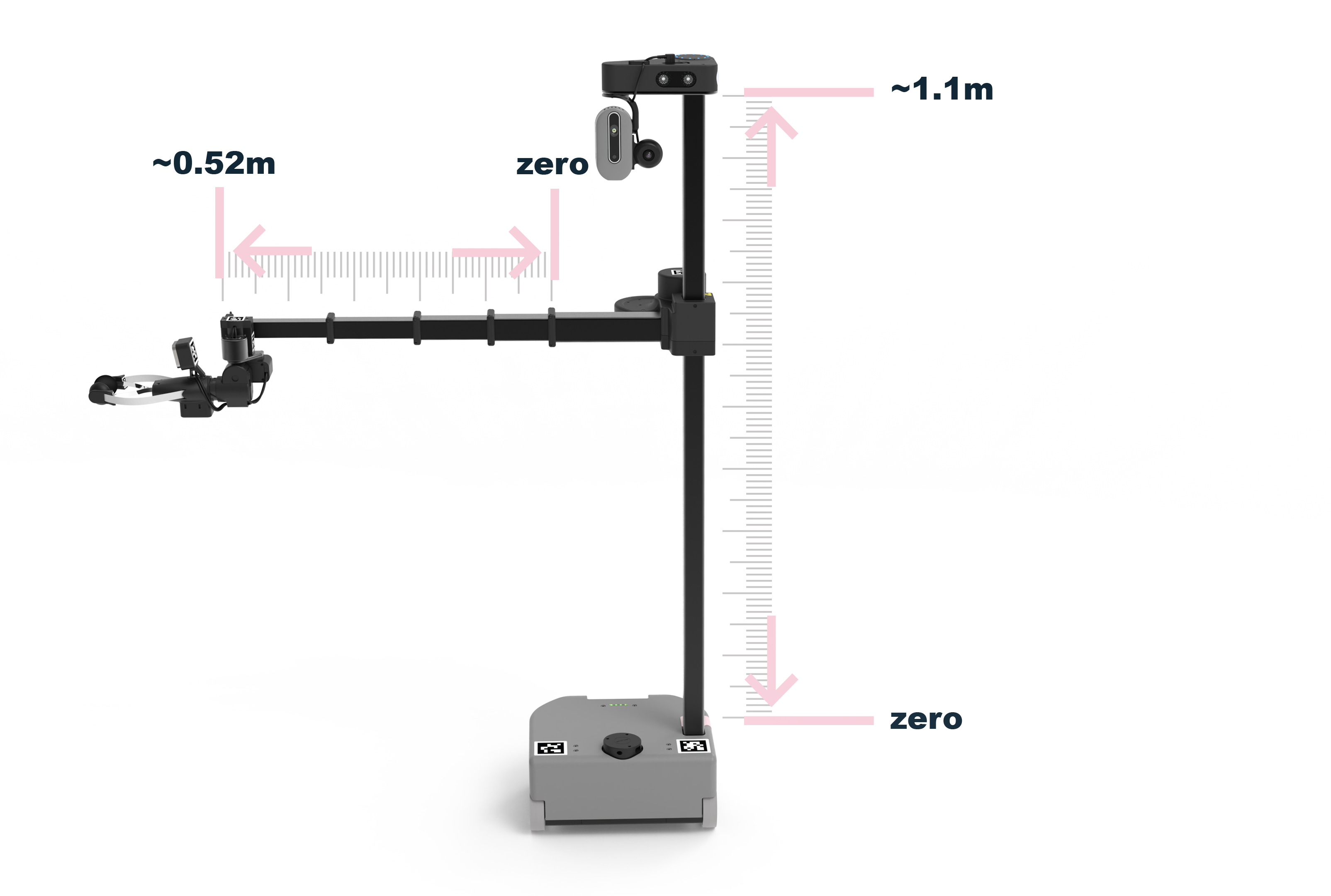 { width="500" loading=lazy }
{ width="500" loading=lazy }
print(r.lift.soft_motion_limits['hard']) # (lower bound in meters, upper bound in meters)
print(r.arm.soft_motion_limits['hard'])
soft_motion_limits is a dictionary with four keys: "collision", "user", "hard", and "current". Each key maps to a [lower bound, upper bound] tuple. "collision" is used by Stretch Body's self collision avoidance algorithm to set software limits on the joint. "user" is used by you, the user, to set application specific software joint limits. "hard" is the hardware limits of the joint. And "current" is the aggregate of the previous three limits into the final limits enforced by the software.
Wrist Joints
| Yaw | Pitch | Roll |
|---|---|---|
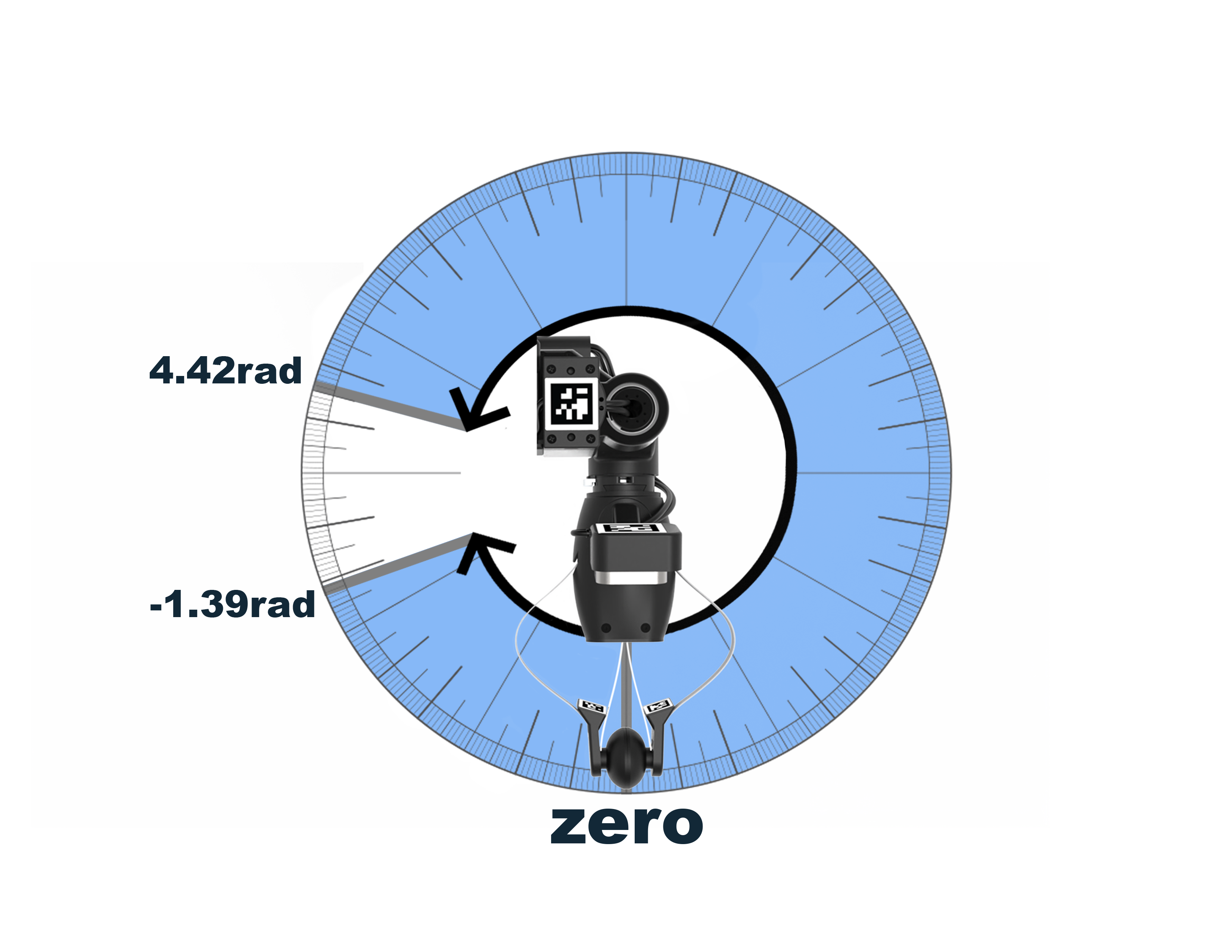 { loading=lazy } { loading=lazy } |
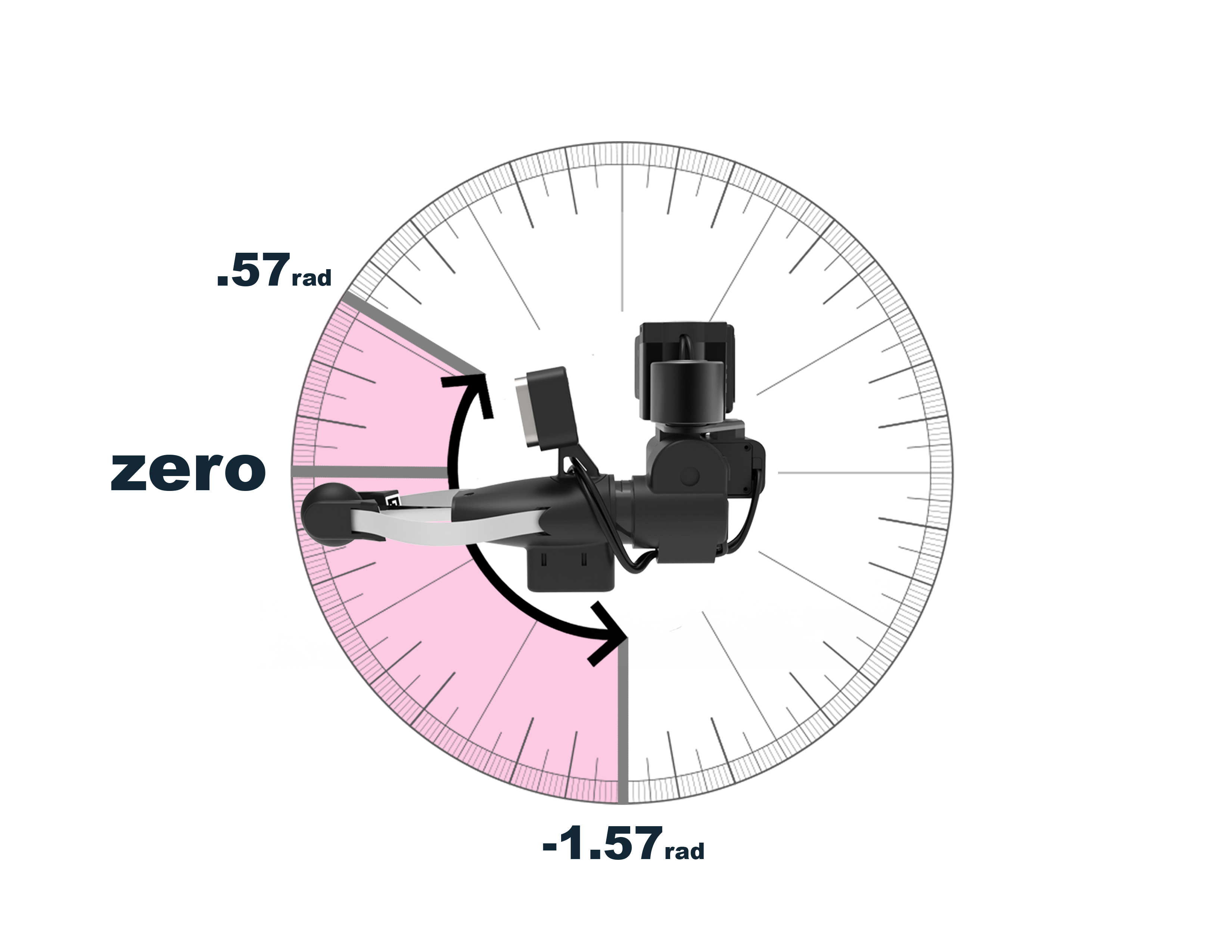 { loading=lazy } { loading=lazy } |
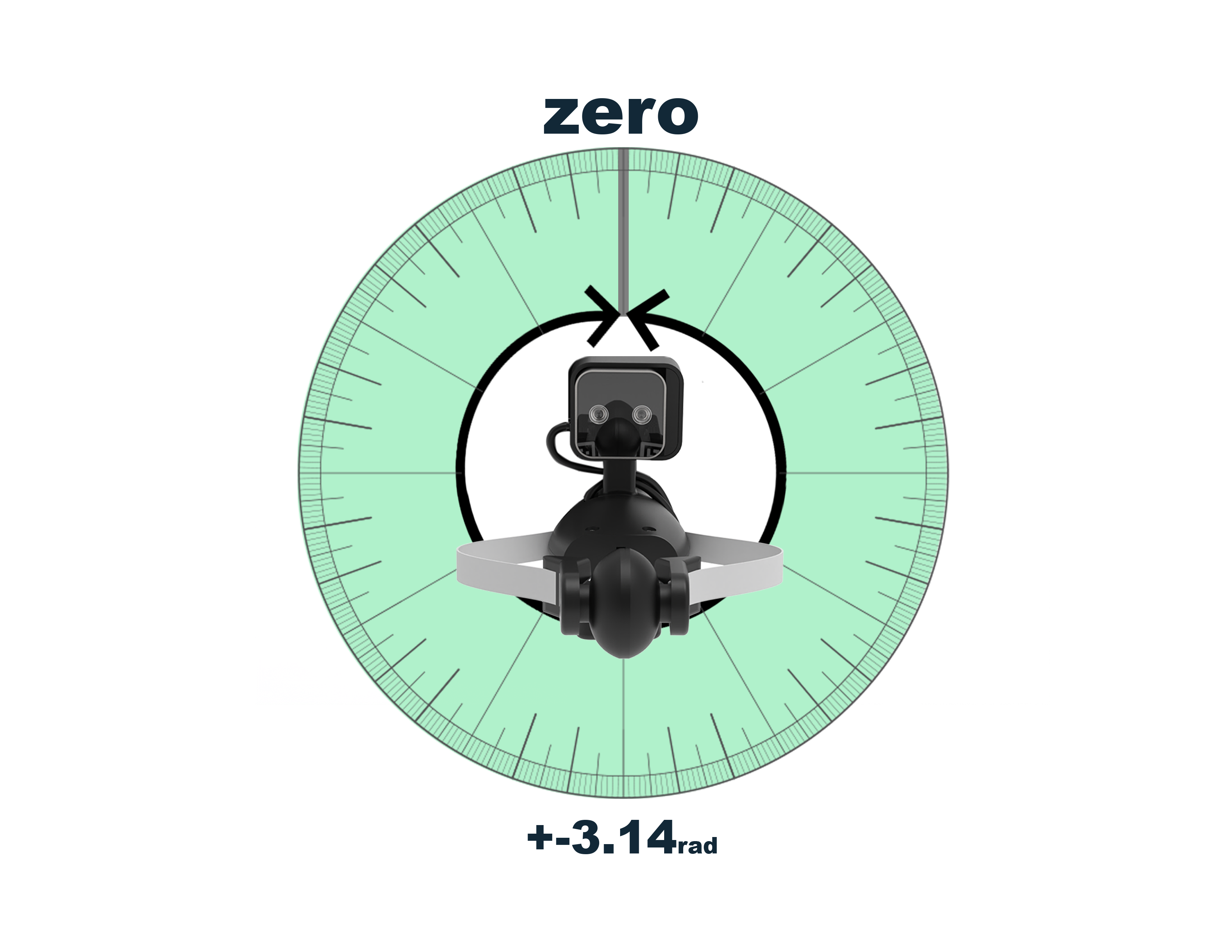 { loading=lazy } { loading=lazy } |
print(r.end_of_arm.get_joint('wrist_yaw').soft_motion_limits['hard']) # (lower bound in radians, upper bound in radians)
print(r.end_of_arm.get_joint('wrist_pitch').soft_motion_limits['hard'])
print(r.end_of_arm.get_joint('wrist_roll').soft_motion_limits['hard'])
Head Joints
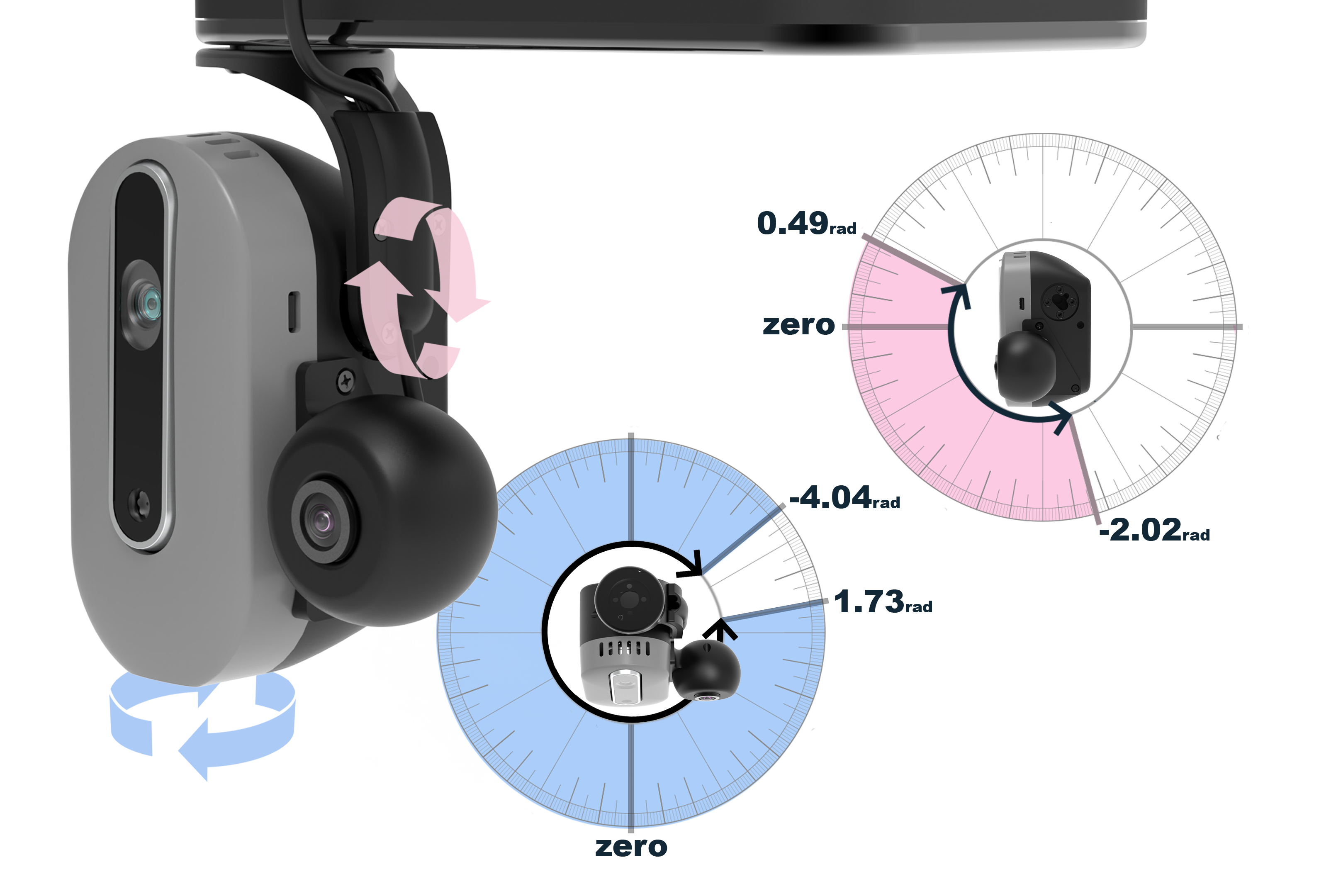 { width="500" loading=lazy }
{ width="500" loading=lazy }
print(r.head.get_joint('head_pan').soft_motion_limits['hard']) # (lower bound in radians, upper bound in radians)
print(r.head.get_joint('head_tilt').soft_motion_limits['hard'])
Sending Velocity Commands
Each joint accepts velocity commands via the set_velocity(vel) API.
r.arm.set_velocity(0.01) # extends 1 cm/s
r.push_command()
Once again, Dynamixel joints push their commands immediately.
r.end_of_arm.get_joint('wrist_yaw').set_velocity(0.1) # rotate CCW at 0.1 rad/s
The base can execute translational (v) and rotational (ω) velocity simultaneously via set_velocity(v, ω). You will often see navigation motion planners choose to control mobile bases with v and ω velocities.
r.base.set_velocity(0.01, 0.05) # follow a circular path
r.push_command()
Following Cubic/quintic Splines
Stretch's joints can follow trajectories defined as splines. You will often see geometric motion planners, graphics software (e.g. Blender, Unity3D), and motion capture systems choose to formulate robot trajectories as splines. Spline trajectories are a series of position waypoints, associated with a time at which the joint should reach the position, and optionally associated with a velocity/acceleration that the joint should be traveling at when it passes the waypoint.
Each joint has a trajectory attribute that is an instance of either stretch_body.trajectories.RevoluteTrajectory (for the wrist & head joints), stretch_body.trajectories.PrismaticTrajectory (for the arm & lift), or stretch_body.trajectories.DiffDriveTrajectory (for the base). Adding waypoints looks like:
r.arm.trajectory.add(t_s=0.0, x_m=0.0, v_m=0.0)
r.arm.trajectory.add(t_s=10.0, x_m=0.5, v_m=0.0)
r.arm.trajectory.add(t_s=20.0, x_m=0.0, v_m=0.0) # 20 second trajectory extending & retracting the arm
Then begin tracking the trajectory using:
r.follow_trajectory()
Trajectories are preemptive. You can edit the future waypoints in a trajectory while the robot is actively tracking it. For example, geometric planners can use this adapt to changing environments.
You can stop a trajectory early using stop_trajectory().
Coordinated Motion through Trajectories
Check out the Creating smooth motion using trajectories tutorial for more info on creating coordinated joint movements.