
 Mohamed Fazil
60c6eb2aab
Mohamed Fazil
60c6eb2aab
|
1 year ago | |
|---|---|---|
| .. | ||
| config | 1 year ago | |
| launch | 1 year ago | |
| nodes | 1 year ago | |
| scripts | 3 years ago | |
| urdf | 1 year ago | |
| worlds | 3 years ago | |
| CMakeLists.txt | 3 years ago | |
| LICENSE.md | 3 years ago | |
| README.md | 1 year ago | |
| package.xml | 3 years ago | |
README.md

Overview
stretch_gazebo is an implementation of simulating a Stretch robot with Gazebo simulator.
Details
The urdf directory contains a xacro file that extends the capabilities of the original xacro files living in stretch_description package to include Gazebo functionality.
The config directory contains rviz files and ros_control controller configuration files for various parts of the robot including:
- Base: diff_drive_controller/DiffDriveController
- Arm: position_controllers/JointTrajectoryController
- Gripper: position_controllers/JointTrajectoryController
- Head: position_controllers/JointTrajectoryController
- Joints: joint_state_controller/JointStateController
The launch directory includes two files:
- gazebo.launch: Opens up an empty Gazebo world and spawns the robot loading all the controllers, including all the sensors except Cliff sensors and respeaker.
- teleop_keyboard.launch: Allows keyboard teleop in the terminal and remaps cmd_vel topics to /stretch_diff_drive_controller/cmd_vel, which the robot is taking velocity commands from.
- teleop_joy.launch: Spawns a joy and teleop_twist_joy instance and remaps cmd_vel topics to /stretch_diff_drive_controller/cmd_vel, which the robot is taking velocity commands from. Note that the teleop_twist_joy package has a deadman switch by default which disables the drive commands to be published unless it is being pressed. For an Logitech F310 joystick this button is A.
The script directory contains a single python file that publishes ground truth odometry of the robot from Gazebo.
Setup
These set up instructions will not be required on newly shipped robots. Follow these instructions if stretch_gazebo is not present in your ROS workspace or you are simulating Stretch on external hardware. Clone stretch_ros and realsense_gazebo_plugin packages to your catkin workspace. Then install dependencies and build the packages, with the following set of commands:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/hello-robot/stretch_ros -b dev/noetic
git clone https://github.com/pal-robotics/realsense_gazebo_plugin
cd ~/catkin_ws
rosdep install --from-paths src --ignore-src -r -y
catkin_make
In order to use the built packages, make the packages discoverable by sourcing the ROS workspace: source ~/catkin_ws/devel/setup.bash. It is popular to add the sourcing command to your ~/.bashrc file, so that the ROS packages are discoverable in every new terminal that is opened.
Running Demo
# Terminal 1:
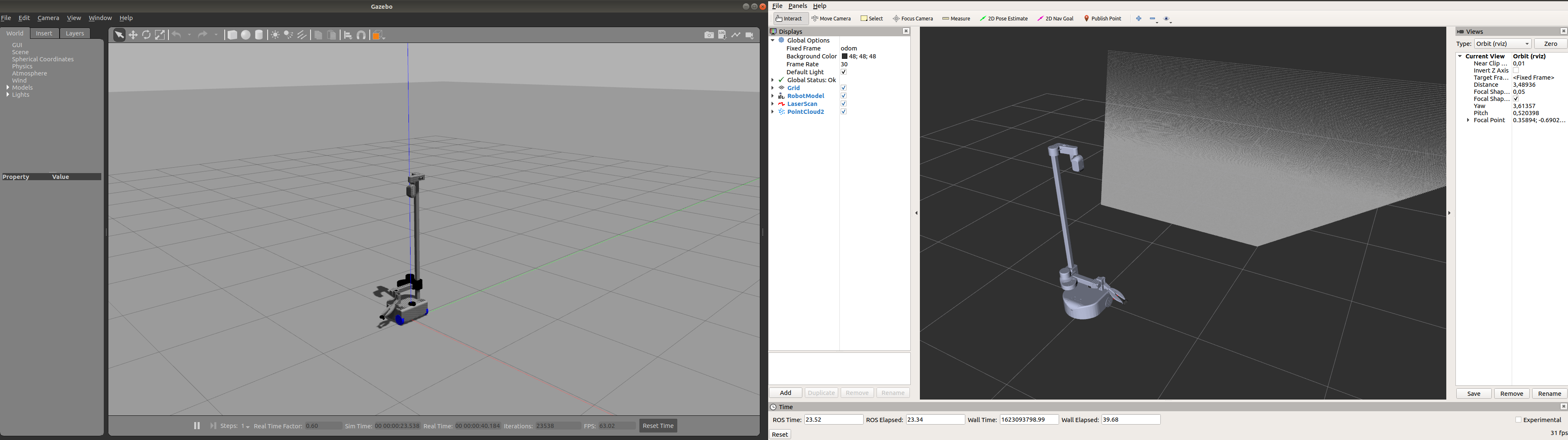
roslaunch stretch_gazebo gazebo.launch rviz:=true
# Terminal 2:
roslaunch stretch_core teleop_twist.launch twist_topic:=/stretch_diff_drive_controller/cmd_vel linear:=1.0 angular:=2.0 teleop_type:=keyboard # or use teleop_type:=joystick if you have a controller
This will launch an Rviz instance that visualizes the sensors and an empty world in Gazebo with Stretch and load all the controllers. Although, the base will be able to move with the joystick commands, the joystick won't give joint commands to arm, head or gripper. To move these joints see the next section about Running Gazebo with MoveIt! and Stretch.
Running Demo with Keyboard Teleop node
keyboard_teleop_gazebo : node that provides a keyboard interface to control the robot's joints within the gazebo simulation.
# Terminal 1:
roslaunch stretch_gazebo gazebo.launch rviz:=true
# Terminal 2:
rosrun stretch_gazebo keyboard_teleop_gazebo
Running Gazebo with MoveIt! and Stretch
# Terminal 1:
roslaunch stretch_gazebo gazebo.launch
# Terminal 2:
roslaunch stretch_core teleop_twist.launch twist_topic:=/stretch_diff_drive_controller/cmd_vel linear:=1.0 angular:=2.0 teleop_type:=keyboard # or use teleop_type:=joystick if you have a controller
# Terminal 3
roslaunch stretch_moveit_config demo_gazebo.launch
This will launch an Rviz instance that visualizes the joints with markers and an empty world in Gazebo with Stretch and load all the controllers. There are pre-defined positions for each joint group for demonstration purposes. There are three joint groups, namely stretch_arm, stretch_gripper and stretch_head that can be controlled individually via Motion Planning Rviz plugin. Start and goal positions for joints can be selected similar to this moveit tutorial. A few notes to be kept in mind:
- Planning group can be changed via Planning Group drop down in Planning tab of Motion Planning Rviz plugin.
- Pre-defined start and goal states can be specified in Start State and Goal State drop downs in Planning tab of Motion Planning Rviz plugin.
- stretch_gripper group does not show markers, and is intended to be controlled via the joints tab that is located in the very right of Motion Planning Rviz plugin.
- When planning with stretch_head group make sure you select Approx IK Solutions in Planning tab of Motion Planning Rviz plugin.
Differences in Gazebo vs Stretch
The simulated Stretch RE1 differs from the robot in the following ways.
Gazebo Sensors vs Stretch Sensors
| Sensor | Gazebo | Stretch | Notes |
|---|---|---|---|
| LIDAR | ✔️ | ✔️ | |
| Base IMU | ✔️ | ✔️ | |
| Wrist Accelerometer | ✔️ | ✔️ | Modeled as an IMU |
| Realsense D435i | ✔️ | ✔️ | |
| Respeaker (Mic Array) | ❌ | ✔️ | |
| Cliff Sensors | ❌ | ✔️ |
Notes: Although there is no microphone in Gazebo, Respeaker can be represented with a ROS node that accesses compputer's microphone. Cliff sensors are not modeled but they can also be represented as 1D LIDAR sensors. See LIDAR definition in stretch_gazebo.urdf.xacro file.
MoveIt Controllers vs stretch_core
Actuators are defined as ros_control transmission objects in Gazebo using PositionJointInterfaces. MoveIt is configured to use three different action servers to control the body parts of stretch in Gazebo through the srdf file in stretch_moveit_config package. See the section above about MoveIt for details. Please note that this behavior is different than stretch_core as it works with a single Python interface to control all the joints.
Uncalibrated XACRO vs Calibrated URDF
We provide stretch_calibration to generate a calibrated URDF that is unique to each robot. The calibrated URDF is generated from the nominal description of Stretch RE1, the xacro files that live in stretch_description. The simulated Stretch RE1 is generated from the gazebo xacro description in the urdf directory and is not calibrated.
License
For license information, please see the LICENSE files.