
11 KiB
Example 10
!!! note ROS 2 tutorials are still under active development.
This tutorial provides you with an idea of what tf2 can do in the Python track. We will elaborate on how to create a tf2 static broadcaster and listener.
tf2 Static Broadcaster
For the tf2 static broadcaster node, we will be publishing three child static frames in reference to the link_mast, link_lift, and link_wrist_yaw frames.
Begin by starting up the stretch driver launch file.
ros2 launch stretch_core stretch_driver.launch.py
Open RViz in another terminal and add the RobotModel and TF plugins in the left hand panel
ros2 run rviz2 rviz2
Then run the tf2 broadcaster node to visualize three static frames.
ros2 run stretch_ros_tutorials tf_broadcaster
The GIF below visualizes what happens when running the previous node.
OPTIONAL: If you would like to see how the static frames update while the robot is in motion, run the stow command node and observe the tf frames in RViz.
ros2 run stretch_ros_tutorials stow_command
The Code
#!/usr/bin/env python
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
import tf_transformations
from geometry_msgs.msg import TransformStamped
# This node publishes three child static frames in reference to their parent frames as below:
# parent -> link_mast child -> fk_link_mast
# parent -> link_lift child -> fk_link_lift
# parent -> link_wrist_yaw child -> fk_link_wrist_yaw
class FixedFrameBroadcaster(Node):
def __init__(self):
super().__init__('stretch_tf_broadcaster')
self.br = TransformBroadcaster(self)
time_period = 0.1 # seconds
self.timer = self.create_timer(time_period, self.broadcast_timer_callback)
self.mast = TransformStamped()
self.mast.header.frame_id = 'link_mast'
self.mast.child_frame_id = 'fk_link_mast'
self.mast.transform.translation.x = 0.0
self.mast.transform.translation.y = 0.0
self.mast.transform.translation.z = 0.0
q = tf_transformations.quaternion_from_euler(1.5707, 0, -1.5707)
self.mast.transform.rotation.x = q[0]
self.mast.transform.rotation.y = q[1]
self.mast.transform.rotation.z = q[2]
self.mast.transform.rotation.w = q[3]
self.lift = TransformStamped()
self.lift.header.stamp = self.get_clock().now().to_msg()
self.lift.header.frame_id = 'link_lift'
self.lift.child_frame_id = 'fk_link_lift'
self.lift.transform.translation.x = 0.0
self.lift.transform.translation.y = 2.0
self.lift.transform.translation.z = 0.0
q = tf_transformations.quaternion_from_euler(1.5707, 0, -1.5707)
self.lift.transform.rotation.x = q[0]
self.lift.transform.rotation.y = q[1]
self.lift.transform.rotation.z = q[2]
self.lift.transform.rotation.w = q[3]
self.br.sendTransform(self.lift)
self.wrist = TransformStamped()
self.wrist.header.stamp = self.get_clock().now().to_msg()
self.wrist.header.frame_id = 'link_wrist_yaw'
self.wrist.child_frame_id = 'fk_link_wrist_yaw'
self.wrist.transform.translation.x = 0.0
self.wrist.transform.translation.y = 2.0
self.wrist.transform.translation.z = 0.0
q = tf_transformations.quaternion_from_euler(1.5707, 0, -1.5707)
self.wrist.transform.rotation.x = q[0]
self.wrist.transform.rotation.y = q[1]
self.wrist.transform.rotation.z = q[2]
self.wrist.transform.rotation.w = q[3]
self.br.sendTransform(self.wrist)
self.get_logger().info("Publishing Tf frames. Use RViz to visualize.")
def broadcast_timer_callback(self):
self.mast.header.stamp = self.get_clock().now().to_msg()
self.br.sendTransform(self.mast)
self.lift.header.stamp = self.get_clock().now().to_msg()
self.br.sendTransform(self.lift)
self.wrist.header.stamp = self.get_clock().now().to_msg()
self.br.sendTransform(self.wrist)
def main(args=None):
rclpy.init(args=args)
tf_broadcaster = FixedFrameBroadcaster()
rclpy.spin(tf_broadcaster)
tf_broadcaster.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
The Code Explained
Now let's break the code down.
#!/usr/bin/env python3
Every Python ROS Node will have this declaration at the top. The first line makes sure your script is executed as a Python script.
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
import tf_transformations
from geometry_msgs.msg import TransformStamped
You need to import rclpy if you are writing a ROS 2 node. Import tf_transformations to get quaternion values from Euler angles. Import the TransformStamped from the geometry_msgs.msg package because we will be publishing static frames and it requires this message type. The tf2_ros package provides an implementation of a TransformBroadcaster. to help make the task of publishing transforms easier.
class FixedFrameBroadcaster(Node):
def __init__(self):
super().__init__('stretch_tf_broadcaster')
self.br = TransformBroadcaster(self)
Here we create a TransformStamped object which will be the message we will send over once populated.
self.lift = TransformStamped()
self.lift.header.stamp = self.get_clock().now().to_msg()
self.lift.header.frame_id = 'link_lift'
self.lift.child_frame_id = 'fk_link_lift'
We need to give the transform being published a timestamp, we'll just stamp it with the current time, self.get_clock().now().to_msg(). Then, we need to set the name of the parent frame of the link we're creating, in this case link_lift. Finally, we need to set the name of the child frame of the link we're creating. In this instance, the child frame is fk_link_lift.
self.mast.transform.translation.x = 0.0
self.mast.transform.translation.y = 0.0
self.mast.transform.translation.z = 0.0
Set the translation values for the child frame.
q = tf_transformations.quaternion_from_euler(1.5707, 0, -1.5707)
self.lift.transform.rotation.x = q[0]
self.lift.transform.rotation.y = q[1]
self.lift.transform.rotation.z = q[2]
self.lift.transform.rotation.w = q[3]
The quaternion_from_euler() function takes in a Euler angle argument and returns a quaternion values. Then set the rotation values to the transformed quaternions.
This process will be completed for the link_mast and link_wrist_yaw as well.
self.br.sendTransform(self.lift)
Send the three transforms using the sendTransform() function.
def main(args=None):
rclpy.init(args=args)
tf_broadcaster = FixedFrameBroadcaster()
Instantiate the FixedFrameBroadcaster() class.
rclpy.spin(tf_broadcaster)
Give control to ROS. This will allow the callback to be called whenever new messages come in. If we don't put this line in, then the node will not work, and ROS will not process any messages.
tf2 Static Listener
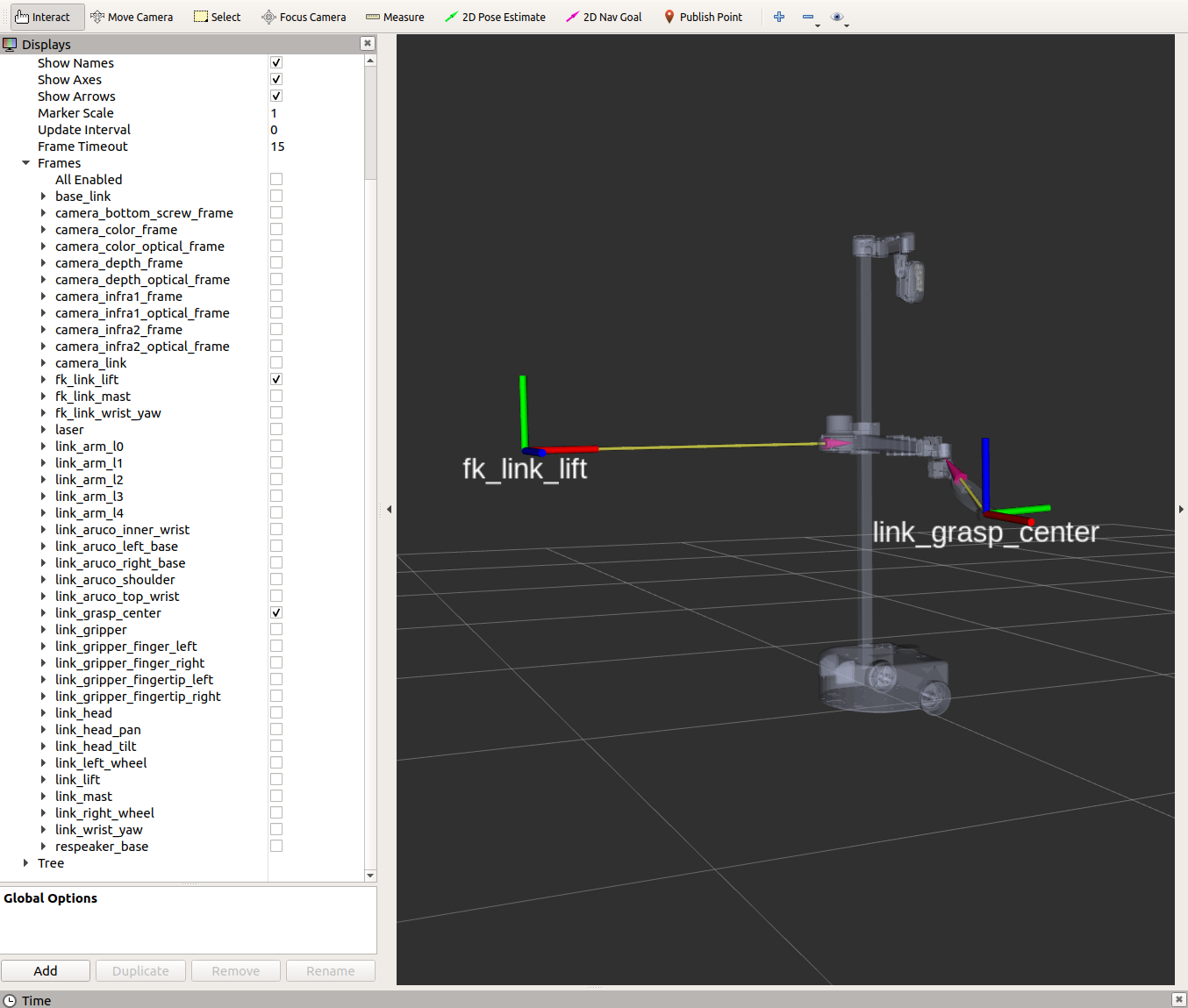
In the previous section of the tutorial, we created a tf2 broadcaster to publish three static transform frames. In this section we will create a tf2 listener that will find the transform between fk_link_lift and link_grasp_center.
Begin by starting up the stretch driver launch file.
ros2 launch stretch_core stretch_driver.launch.py
Then run the tf2 broadcaster node to create the three static frames.
ros2 run stretch_ros_tutorials tf_broadcaster
Finally, run the tf2 listener node to print the transform between two links.
ros2 run stretch_ros_tutorials tf_listener
Within the terminal the transform will be printed every 1 second. Below is an example of what will be printed in the terminal. There is also an image for reference of the two frames.
[INFO] [1659551318.098168]: The pose of target frame link_grasp_center with reference from fk_link_lift is:
translation:
x: 1.08415191335
y: -0.176147838153
z: 0.576720021135
rotation:
x: -0.479004489528
y: -0.508053545368
z: -0.502884087254
w: 0.509454501243
The Code
import rclpy
from rclpy.node import Node
from rclpy.time import Time
from tf2_ros import TransformException
from tf2_ros.buffer import Buffer
from tf2_ros.transform_listener import TransformListener
class FrameListener(Node):
def __init__(self):
super().__init__('stretch_tf_listener')
self.declare_parameter('target_frame', 'link_grasp_center')
self.target_frame = self.get_parameter(
'target_frame').get_parameter_value().string_value
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
time_period = 1.0 # seconds
self.timer = self.create_timer(time_period, self.on_timer)
def on_timer(self):
from_frame_rel = self.target_frame
to_frame_rel = 'fk_link_mast'
try:
now = Time()
trans = self.tf_buffer.lookup_transform(
to_frame_rel,
from_frame_rel,
now)
except TransformException as ex:
self.get_logger().info(
f'Could not transform {to_frame_rel} to {from_frame_rel}: {ex}')
return
self.get_logger().info(
f'the pose of target frame {from_frame_rel} with reference to {to_frame_rel} is: {trans}')
def main():
rclpy.init()
node = FrameListener()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
if __name__ == '__main__':
main()
The Code Explained
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
Here, we create a TransformListener object. Once the listener is created, it starts receiving tf2 transformations over the wire, and buffers them for up to 10 seconds.
from_frame_rel = self.target_frame
to_frame_rel = 'fk_link_mast'
Store frame names in variables that will be used to compute transformations.
try:
now = Time()
trans = self.tf_buffer.lookup_transform(
to_frame_rel,
from_frame_rel,
now)
except TransformException as ex:
self.get_logger().info(
f'Could not transform {to_frame_rel} to {from_frame_rel}: {ex}')
return
Try to look up the transform we want. Use a try-except block, since it may fail on any single call, due to internal timing issues in the transform publishers. Look up transform between from_frame_rel and to_frame_rel frames with the lookup_transform() function.